Definition, usage and classification of encoder
Definition, usage and classification of encoder
Definition of encoder
An encoder is a sensor used for motion control. It uses photoelectric, electromagnetic, capacitive or inductive sensing principles to detect the mechanical position and changes of objects, and convert this information into electrical signals and output them as feedback for motion control, which is transmitted to various motion control devices.
The purpose of the encoder
Encoders are widely used in occasions that require precise determination of position and speed, such as machine tools, robots, motor feedback systems, and measurement and control equipment.
Classification of encoders
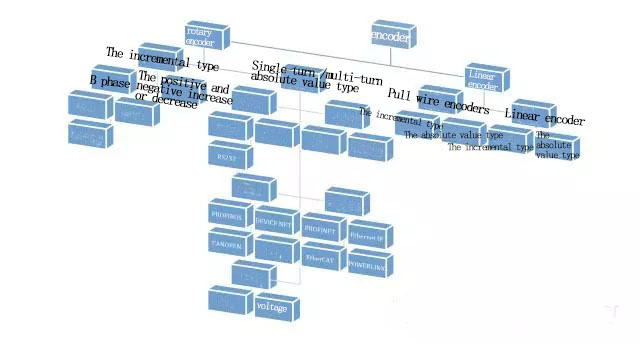
Figure: Overview of the classification of encoders
According to the mechanical structure, the encoder can be divided into a rotary encoder (rotary encoder) and a linear encoder (linear encoder).
Rotary encoders are the most widely used, mainly used to measure the angle, speed of mechanical equipment or the speed of a motor.
Linear encoders are mainly used to measure linear displacement, and can be divided into two types: wire draw encoder and line encoder.
The wire draw encoder is a mechanical combination of a wire draw mechanism and a rotary encoder. The linear motion of the mechanical equipment is converted into circular motion through the mechanical device of the wire draw mechanism, so that the rotary encoder can be used to measure linear displacement.
A linear encoder is usually composed of a reader and a measuring ruler. By detecting the relative position between the reader and the measuring ruler, the mechanical position and its change are calculated.
According to the electrical output form, the encoder can be divided into incremental encoder (incremental encoder) and absolute encoder (absolute encoder).
The output of the incremental encoder is a periodically repeating signal, such as square wave or sine wave pulse. Therefore, it can be divided into square wave incremental encoder and sine cosine wave incremental encoder.
Square wave incremental encoder is one of the most commonly used encoders. The length and speed are calculated by calculating the number and frequency of square wave pulses. Square wave incremental encoders have voltage output, such as TTL (also called long-line drive, line drive or RS422) and HTL (also called push-pull output or push-pull output), and switch output, such as NPN open collector output And PNP open collector output.
The output of the sine-cosine wave incremental encoder is generally 1Vpp or 0.5Vpp sine wave and cosine wave. By calculating the amplitude of the sine and cosine, the tiny angle can be accurately subdivided.
The output of the absolute encoder is a specific digital code representing the actual position. Different coding rules correspond to different communication protocols, which is what we usually call communication interfaces.
The common communication interfaces of absolute encoders are:
Analog quantity (for example, 4-20mA current output and 0-10V voltage output, etc.)
Parallel port (such as push-pull output and open-collector output, etc., each core represents a binary number)
Serial port (such as RS485, RS232, RS422, etc.)
Industrial bus interface (such as SSI, PROFIBUS, DeviceNet, CANOpen, etc.)
Industrial Ethernet interface, etc. (such as PROFINET, Ethernet IP, EtherCAT, POWERLINK, etc.)
Absolute encoders include single-turn absolute encoders (Single-turn absolute encoder) and multi-turn absolute encoders (Muliti-turn absolute encoder). The single-turn absolute encoder can determine the angle within one turn, and the multi-turn absolute encoder can determine the number of turns in addition to the angle within one turn.
According to the working principle of detection, encoders can be divided into optical encoders, magnetic encoders, inductive encoders, capacitive encoders, and so on.
The photoelectric encoder adopts the optical detection principle, and the detection accuracy is generally relatively high, but it requires higher protection requirements when used outdoors and in harsh environments, and is not suitable for use in condensation environments.
Magnetic encoders use magnetoresistance or Hall elements to measure the angle or displacement of magnetic materials. Compared with the optical detection principle, the magnetoelectric detection principle has the characteristics of anti-vibration, anti-pollution, etc., and can be applied to the fields that traditional photoelectric encoders cannot adapt.
According to the mechanical installation method, the encoder can be divided into solid shaft type and hollow shaft type. The hollow shaft type can be divided into blind hole type and through hole type. Encoders used for servo feedback are also commonly installed in taper hole type and taper shaft type.
According to the applicable environment, encoders can be divided into general industrial type, heavy-duty type and explosion-proof type.
-
The principle and application field of Autonics panel products (handling)
 June 12, 2021
June 12, 2021 -
New product launch SRH1 series single-phase SSR with integrated heat sink
 June 12, 2021
June 12, 2021 -
New product launch SRH1 series single-phase SSR with integrated heat sink
 June 12, 2021
June 12, 2021 -
Otto protection grade IP69K new product launched Ø18mm cylindrical (SUS316L housing) photoelectric sensor BRQT series
 June 12, 2021
June 12, 2021 -
Autonics adds shading motion mode sensor
 June 12, 2021
June 12, 2021