How to use encoder to measure speed and angle
How to use encoder to measure speed and angle
At work, we will encounter some mechanical equipment's rotating shaft that needs to measure its operating speed and angle, such as punching machines and shearing machines in the hardware industry, or two rotating shafts that need to operate at a certain speed ratio, such as metal processing lathe threading.
To achieve this function, we need to install an encoder on the axis to be measured, which is generally incremental. To measure the forward and reverse rotation of the axis, use the AB phase output, as long as the A single-phase output is used to measure one direction. If you need to measure the angular position, it is better to use an encoder with ABZ phase output.
After the encoder is installed, a measurement controller should be connected to the output of the encoder. Generally, the following types of controllers are used: 1. Single-chip microcomputer or DSP. With this type of controller, open collector output can be selected according to the interface circuit. Or encoder with differential output. 2. PLC controller, if it is connected to the basic unit of PLC, generally select open collector output, if it is an expansion unit, there are collectors and differential inputs. 3. For digital control processing cards and servo drives, differential output encoders are used in most cases with this controller.
After the measuring controller is connected, the next step is to write the software program. The following figure is an explanation of measuring the speed with Mitsubishi PLC.
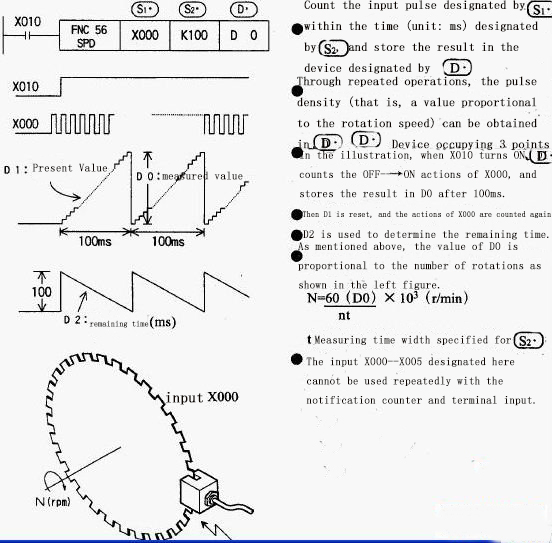
The software programming idea is as follows: the first step is to count the number of input pulses to D0 within the specified time, and the second step is four arithmetic operations to calculate the speed N=60*D0*1000/(n*t), where n means the encoder rotates one Number of output pulses, t represents the specified measurement time (ms)
Using this method, the measurement accuracy and encoder resolution are inversely proportional to the measurement time width. When the rotating body rotates at a high speed (above 200r/min), the error can reach below 5R/MIN.
If you want to measure the angular position, you only need to accumulate the number of Z-phase pulses + the number of A or B-phase count pulses, and you can calculate the number of angles in the current position.
With this method, it should be noted that the pulse speed acceptable to the controller at the highest speed exceeds the limit value and the measurement is not accurate.
-
The principle and application field of Autonics panel products (handling)
 June 12, 2021
June 12, 2021 -
New product launch SRH1 series single-phase SSR with integrated heat sink
 June 12, 2021
June 12, 2021 -
New product launch SRH1 series single-phase SSR with integrated heat sink
 June 12, 2021
June 12, 2021 -
Otto protection grade IP69K new product launched Ø18mm cylindrical (SUS316L housing) photoelectric sensor BRQT series
 June 12, 2021
June 12, 2021 -
Autonics adds shading motion mode sensor
 June 12, 2021
June 12, 2021